![]() ■第七章 エネルギー機動性理論の時代
■第七章 エネルギー機動性理論の時代
■エネルギー機動ダイヤグラム
前回はエネルギー機動性理論の数値を求める計算式を見ました。今回はその計算結果をどうやって利用するのかを見て行きます。
とりあえず航空機の機動性能で大きな比重を占めるのが旋回性能で、この旋回性能をエネルギーの点から見るのがエネルギー機動性理論とも言えます。それを見やすく表現するためにボイドが考案したのが、エネルギー機動ダイアグラム(Energy
Maneuverability
diagram)でした。これはグラフなんですが、説明無しで読み解くのはほぼ不可能であろう、というくらい特殊なもので、何のデータも入ってない状態で、以下のような形となります。
最初はこれの読み方から説明しましょう。
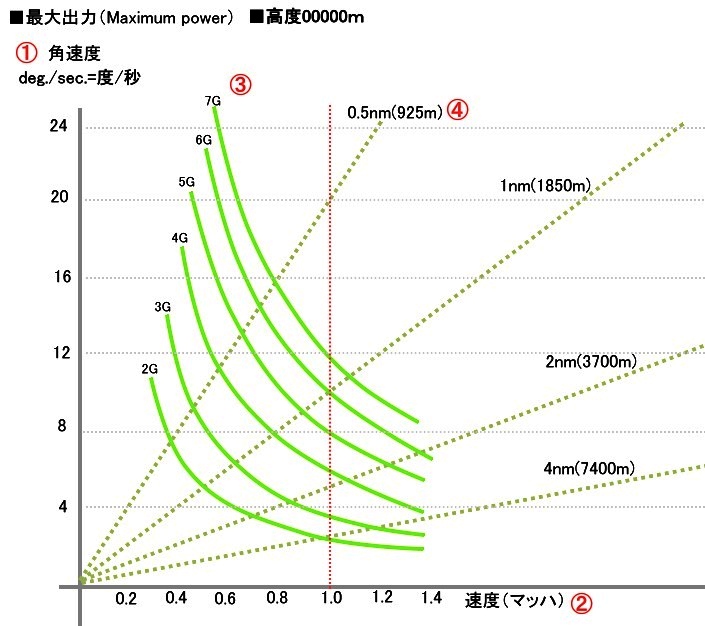
まず、一番左上にエンジン出力と飛行高度の条件が書かれています。
エンジン出力は最大に設定された上でアフターバーナーあり、無しの二種類、さらにその条件で高度ごとのグラフが数種造られるのが一般的です。高度が上がると一般に性能は悪化するので一枚だけのグラフでは判断が出来ないからで、よってアフターバーナー有り、無しで低高度、中高度、高高度と通常6枚前後のグラフが機種ごとにセットになって作成されます。
まずはこのグラフの縦軸と横軸を見て行きましょう。
① 縦軸 角速度
1秒間に何度旋回したか、を示しています。基本的に、グラフの上に行くほど角速度が大きくなり、旋回率のいい機体という事になりますが、実際は旋回半径、小回りの良さと併せてみる必要があります。この点はまた後で。
角速度の単位はラジアン/秒の方が計算が楽なんですが、なぜか度/秒単位で示されているグラフが多いです。パイロットが直感的に理解できるようにですかね。
ちなみに前回見た比エネルギー速度は、重量1㎏あたりの比エネルギーと機体速度から計算で求めてました。
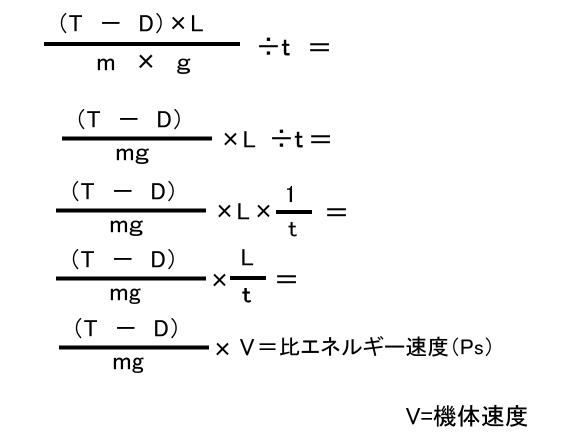
(T=エンジン推力、D=抵抗力、m=機体質量、g=重力加速度)
これですね。
よって本来ならグラフの縦横軸はこの二つになるべきなんですが、速度はそのまま横軸に入ってますが、縦軸は旋回速度に置き換えられ、比エネルギーの項目はグラフ中にはどこにも出て来ません。そういった意味でもちょっと特殊なグラフとなっています。
ちなみに機体の角速度は
角速度(ω)=速度÷旋回半径
で求められますので、後で出て来る④で指定された旋回半径と、すでに判ってる機体の飛行速度から計算します。ちなみにωはオメガと読みます。
ただしこの計算で求められる角度の数字はラジアンになりますから、度数に直すには変換が必要です。なので、本来は角速度の単位はラジアンの方が計算が速いんですけどね。
②の横軸 飛行速度
横軸は計算でも使われていた機体速度がそのまま入ります。
ただし通常は音速のマッハ数が単位として使われるようで、このグラフでは途中にある赤い点線がマッハ1を示し、ここからが音速となります。この辺り、なぜ音速表記なのかはよく判りませんが、ボイドの事なので何かメリットを見つけていたのだと思われます。
ちなみに音速は高高度になるほど遅くなるため同じ数字でも高度によって時速は異なるのに注意してください(高度1万mだと海面高度に比べ音速は10%以上低速となる)。
ちなみにこの図だとマッハ1.4までしかありませんが、空中戦をやるなら、これ以上の速度では困難になるので必要ないのでしょう。例えば高度3000m前後でマッハ1.4だと、1秒間で475m近く移動しますから、すれ違った1秒後には両者は900m近くも距離が離れてしまいます。相手を補足しないと成立しない空中戦では、これじゃ勝負になりませんから、この辺りの速度が実用限度なのでしょう。
ここまでは、普通に学校などで習うグラフと同じですが、このグラフは、何も書き込まれてない状態で、妙な曲線やら斜めの線が入ってます。これがこのグラフの特徴であり重要な部分でもあります。
お次はこの辺りを見て行きましょう。
③ 緑のG曲線
これは機体にかかるG、重力加速度(g)を示してます。例の計算式で質量に掛け算していた量ですね。旋回中の機体に掛るGはほぼ遠心力(厳密には機体が直進しようとする慣性に対抗する内向きの加速度)なので、これを求める計算は、
加速度(g)=(速度(V)×速度(V)÷旋回半径(r))÷9.8
(g=(v2/r)/9.8)
の式で求めることが出来ます。
9.8は重力加速度Gに換算するための重力の係数で、単なる加速度(a)を求めるだけなら要りません。ちなみに、この加速度Gは単に加速度であり、力の大きさでは無いのに注意してください。これを機体の質量(m)に掛けるて初めて力(F)になります。この点はよく勘違いされてますので要注意。
ちなみに上の計算で答えが1となれば地球の重力加速度と等価で、地上で普通に感じる大きさの下向きの力が生じます。これが2Gの加速度なら自分の体重が2倍、3Gなら3倍になるような力がかかって来る、と思ってください。通常、4~6Gあたりが人間の耐えられる限界で、Gスーツの装着や訓練を受けても9G前後が限度のようです。
そもそも頑丈な戦闘機の機体ですら通常10G前後を超えると生じる力によって破壊されてしまいます(湾岸戦争で12G旋回に耐えたF-15があったとされるがそもそもパイロットが生きてられないと思うんですが…)。
機体にかかる巨大な力を支える主翼の揚力はエネルギーを消費して得られるものです。よって旋回中はどんどんエネルギーが消費されます。このためより大きなエンジン推力が必要になり、アフターバーナーを使う事が多くなるのですが、それでもエネルギーが足りなければ、次に位置エネルギーを消費する事になってしまい、この結果、どんどん高度が低下して行きます。
戦闘機やアクロバット機のパイロットの方、フライトシュミレーターをやってる人は知ってると思いますが、航空機で高いGのかかる急旋回をやると、急速に高度(=位置エネルギー)が失われます。その要因がこの消費エネルギーの増大です。
膨大なエネルギーの消費に、エンジン出力(=運動エネルギー)が追いつかなくなると、次は高度(=位置エネルギー)が消費されてしまう事になるわけです。空中戦やアクロバット飛行における3Gを超えるような急旋回ではエネルギー消費は急速に増大し、その補充が焦点になってきます。この点がエネルギー機動性理論の要の一つです。
ちなみに逆にこれを利用し、旋回によってエネルギーを消費して速度と高度を落し着陸に備えるという飛び方もあります。
ちなみにエネルギーの損失、つまり高度と速度の低下を伴わなわず、さらに両者の上昇も起こらない一定高度、一定速度を維持した旋回を「維持旋回(Sustained
turn)」と呼び、この状態、Ps=
0の状態の性能を比較するのがエネルギー機動性理論の基本となって行きます。
④ 旋回半径の線
④の線は旋回半径を示しており、これと先に見た角速度を一緒に見る事で機体の旋回性能がわかります。
このグラフでは海里(nautical mile/nm 1nm=
約1.8㎞)の単位で半径の長さが示されてますが、フィートで示されるタイプもあります。ちなみに上に向かうほど小さな数字ですが、旋回半径は小さいほうがいいので、角速度と同じように上にある方が優秀、という事になります。このため同じPs量の機体なら、より上部にある方が機動能力が高い、という点は覚えておいてください。
もちろん、Ps量が異なる数字での比較は意味がありませんから注意。
とりあえずグラフの説明は以上です。このグラフ上に各機体の比エネルギーの計算数値を書き込んで行って機体の機動性の優劣を判断するのがEMダイヤグラムとなります。
■EMダイヤグラムの実例
ここからは実際のエネルギー機動性理論のダイヤグラムを見て行きます。
ボイドが米空軍向けのブリーフィングで使ったと言われている朝鮮戦争におけるライバル機、アメリカのF-86Fとソ連のミグ15の性能比較ダイヤグラムを見てみましょう
ただしこれ、あくまで参考用のグラフでそもそも設定高度すらわかりません。さらに実際のデータはこんなキレイなグラフには絶対にならないはずで、どうも当時のコンピュータの性能の限界などから多少全体をならした数字、という印象もあります。
それでもグラフの読み取り方を覚えるにはちょうどいいと思われるので、とりあえず見て置きましょう。
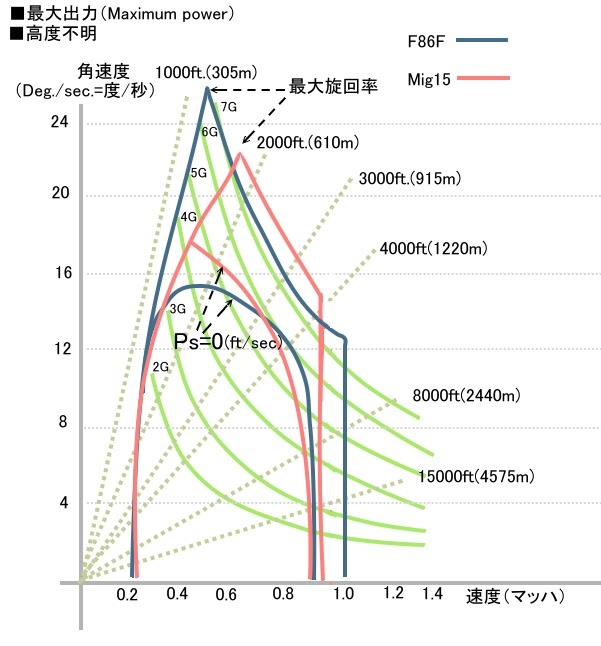
青線がF-86Fの、赤線がサブタイプ不明のミグ15の性能を示します。
マッハ0.2あたりからグラフは始まりミグ15(赤線)はマッハ0.9あたり、F-86F(青線)はマッハ1あたりまでグラフが続きます。ちなみにF-86がマッハ1まで出てしまってるのは位置エネルギー(重力)を使った急降下時のデータで、エンジン出力だけの水平飛行ではこの速度は出ません。
最初に両機のグラフの赤と青の線が途中から二本に分岐するのに注意して下さい。これはエネルギーの損失および上昇が無い維持旋回状態 Ps=0 の線(下)と、エネルギーの損失(高度や速度の低下)を伴うPs=マイナス旋回の線(上)が分岐したものです。
下側のPs=0の線は当然、例の計算式の答えがPs=0になる条件の数字の位置を繋いだもの、上の線はエネルギーの損失、すなわち高度の低下を伴いながらの限界性能の数値を繋いだものです。すでに説明したように上にある方が優秀なのですが上の線の条件で飛行すると、位置エネルギー、すなわち高度を盛大に喪失しますので通常は使えません。なので、エネルギー機動ダイヤグラムでは比エネルギー速度(Ps)=0、矢印で示した線が基準線となり、こちらで大筋の性能比較を行います。
そしてPs=0の線は高度(位置エネルギー)と速度(運動エネルギー)が増える事もない代わりに失われる事も無い、すなわち同じ速度、同じ高度を維持して旋回する維持旋回ができる条件を示してます。
つまりエネルギーを失わずに旋回できるギリギリの線であり、これはもっとも効率よく旋回できる条件を示している線でもあるのです。そのような速度と高度を変化させない旋回を維持旋回と呼びます。同時にこの飛行に必要な機体にかかるGを維持加速度(Sustained
G)と呼び、これらが全ての飛行中の機動の基準値となります。
グラフ上でPs=
0の線より上にある線はPs=マイナス、すなわちその速度を維持する旋回で位置エネルギー(高度)の損失が発生する条件であり、当然、空戦には不利です。
ちなみにこのグラフにはありませんが、Ps=
0の線より下のエリアだと、Ps=プラスとなり、逆にエネルギーが増大し、これを高度でも速度でも自由に上昇させられますから空戦を有利に運べます。ちなみにこのグラフでは二本に分岐する前までの線もエネルギー比(Ps)=
0を示します。
■F-86とミグ15
ここでEMダイヤグラムの基準線、エネルギー比(Ps)=0の線で両機の性能を比べて見ましょう。
するとマッハ0.4~0.8というもっとも戦闘に使われる速度領域においてミグ15(赤線)がF-86F(青線)を常に上回っているのが読み取れると思います。マッハ0.8辺りからF-86Fが優位に立ちますが、ほぼ速度限界であり、この速度で空戦を行うのはかなりの困難を伴ったと思われます。よって実際の戦闘ではミグ15が完全に優位に立っていたと見て問題ありません。F-86F、性能的には負けているのです。
そしてこのミグ15の性能の優位は既に朝鮮戦争中、アメリカ空軍もある程度気が付いてましたから、ボイドがグラフにすることでより論理的に説明がなされ、これが多くの関係者がエネルギー機動性理論の有用性に気が付くきっかけとなったようです。
ちなみに、そんな優秀なミグ15に対しF-86は朝鮮戦争を通じて互角以上の戦いを行なっています。それはなぜか、と考えたボイドがたどり着くのが観察と行動の速度の問題、OODAループとなって行きます。この辺りはまた後ほど。
最後に、ちょっと実用的な話をすると、このダイヤグラムは単なる性能比較以外にも意味を持ちます。
例えば、もっとも効率よくエネルギーを使って旋回したいなら、Ps=0、維持旋回の線を見て飛行速度とGをそれに合わせて飛べばいいのです。速度がマッハ0.4(X軸)前後なら、両機とも3Gの加速度をかけて回るのが理想的だとグラフから読み取れます(旋回半径は機体性能によって自動的に決まってしまう)。
このため経験豊富なパイロットでなくても、あっさりその機体の限界性能を引き出せる事になるわけです。